Overview:
The current development of the artificial intelligence on a hobby scale plane project has been slowly progressing but what it was missing was an appropriate airframe that could handle the weight of the on-board computers and also could fly for a long duration. Using the new battery packs that I made, The airframe could fly for more than an hour and provide serial telemetry back to ground up to 15 km away.
Building the Plane:
While the AI project was still kept in mind, I began to select components that would allow for easy autonomous flight. The airframe itself was chosen specifically for it's large wingspan and large payload area. The large wingspan allowed for the plane to fly at low speeds without stalling and would generate enough lift to support heavy future payloads. The pusher propeller in the middle of the plane is unique in that it allows unobstructed views out the front of the plane for various cameras and sensors. Also the large propeller and motor allow for very low power consumption for a lot of thrust.

The next big hurdle of building the plane was the communications system. While the plane is autonomous, I have to be ready to take over the controls at any second to safely fly the plane in case anything went wrong. The DragonLink System was the perfect candidate for the radio system. The transmitter operates on the 433 MHz band and can transmit up to 60 km away, much further than any project would be flying. Though the receiver on-board the plane is unique in that it accepts serial input that it will transmit back to the ground transmitter where it is received and processed. Then using either USB or Bluetooth, I can pull the data into the computer to monitor the planes health and status.
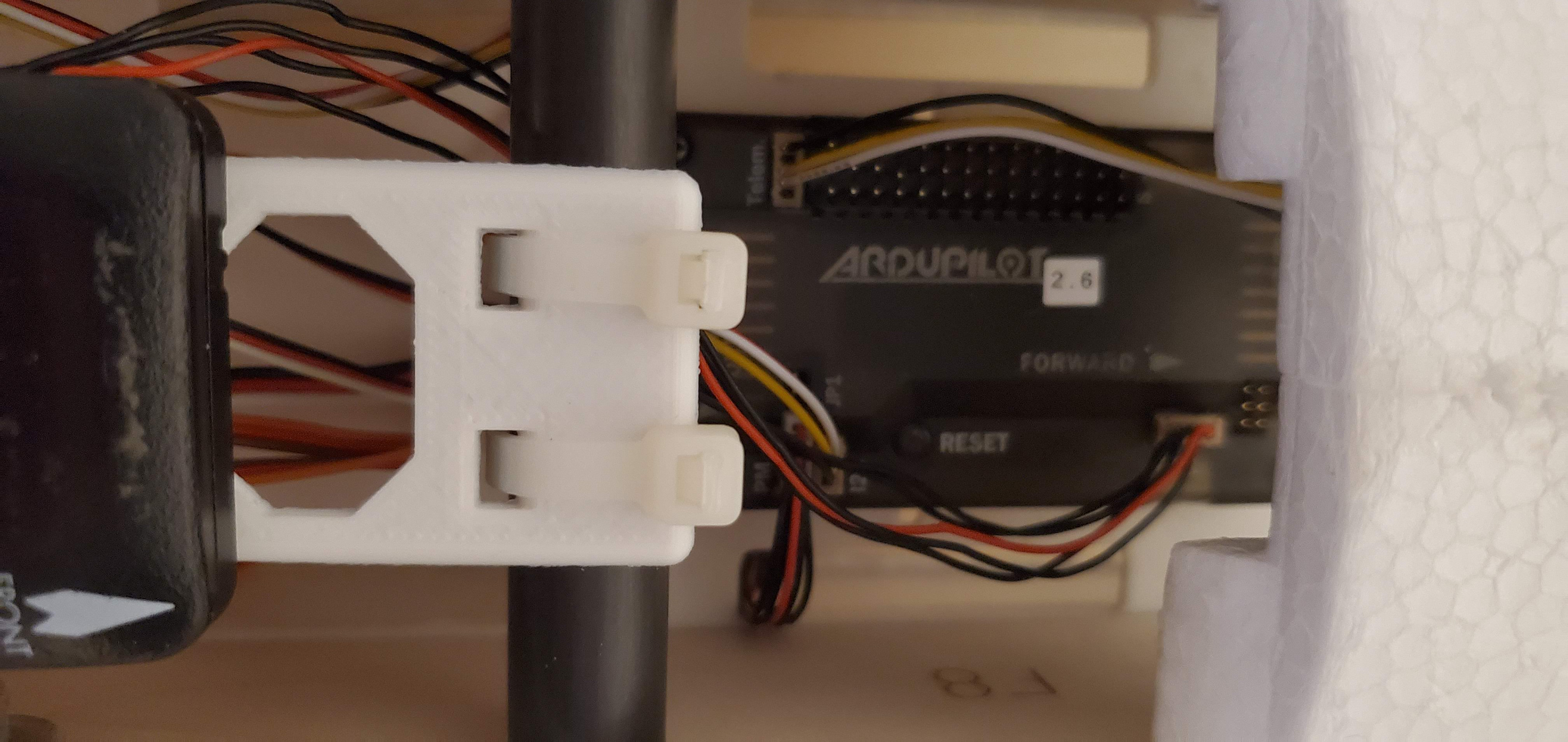
With full intentions of integrating a completely custom flight computer in the future, I wanted to choose one that was reliable and well known so development can be primarily focused on the AI portion of the aircraft. For the flight controller, I ended up going with the Ardupilot APM 2.6 Flight Controller. The benefits were that it accepted many various sensors and compiled the data nicely into a serial output. That way on the ground I could monitor the plane's status through their GUI without even being connected to the plane by USB. Also the flight controller had all of the autonomous functionality that I needed for the project. Flight plans could be made before hand that the plane would follow automatically and the flight controller had auto stabilizing so when the AI computer takes control of the plane, the aircraft would already be more stable and traveling in a straight level flight.
Some of the various sensors that are currently on board are GPS, two magnetometers, three axis accelerometer, three axis gyroscope, barometer, current sensor, and a battery voltage sensor. The combination of these sensors allows me to operate the plane autonomously while being able to monitor everything that it critical for maintaining proper flight. In the future there will be a lot more sensors/devices being added for autonomous flight. These will include: three axis stabilized deplorable HD camera, infrared camera, CCTV camera, radar, ultrasonic distance measuring in all directions, strain gauges along wings and fuselage, individual battery cell voltage monitoring, cellular data receiver/transmitter, analog video transmitter in 900 MHz band, VHF radio transmitter, solar cells, and many more than will allow proper communication and flight while being able to provide the AI core with enough data to properly fly the plane and complete the objectives asked of it.